
El gran proyecto de este curso anual de robótica educativa para nuestros alumnos del nivel G11, es un robot con tracción a las cuatro ruedas (4WD), controlado por una Raspberry Pi 4.
Para llegar a este nivel tecnológico nuestros estudiantes han tenido que recorrer un largo camino aprendiendo programación con Python para poder realizar la medida con sensores y el control de actuadores en tiempo real.
Este robot es 100% autónomo y se puede supervisar gracias a una aplicación que se comunica con un ordenador de forma inalámbrica.
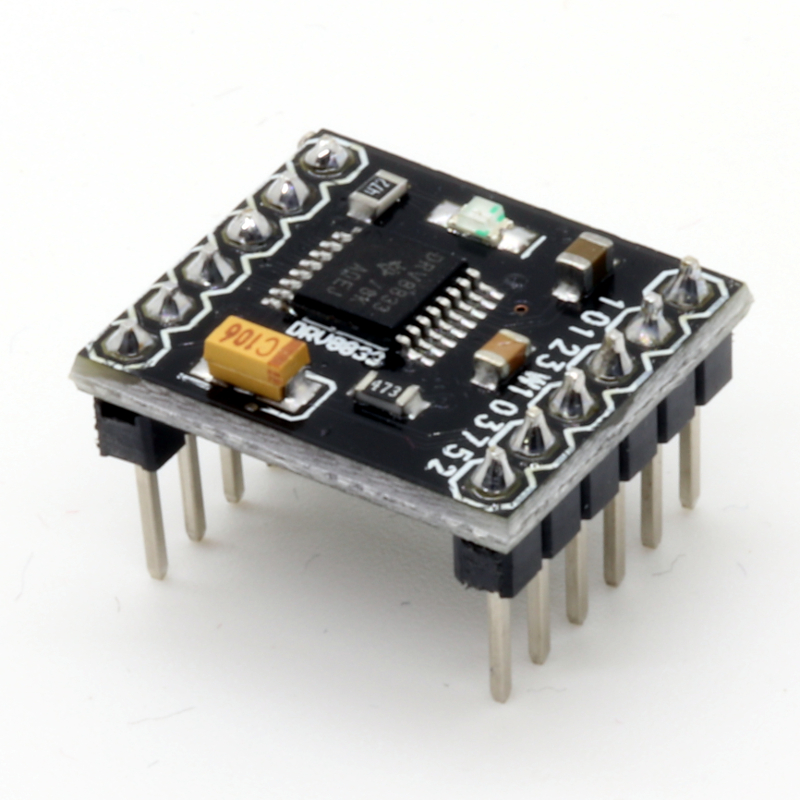
Para el control de motores hemos usado drivers MOSFET de alto rendimiento, como el DRV8833, que pese a su pequeño tamaño proporciona una alta corriente de salida con pocas pérdidas por calentamiento, además su lógica de control es totalmente compatible con la que usa la Raspberry Pi (3,3V).
Con uno solo de estos drivers podemos controlar las cuatro ruedas, en grupos de dos.
El robot dispone además de un sensor de distancias por ultrasonidos HCSR04 y un servo SG90 ambos de una versión compatible con la lógica de 3,3V de la Raspberry Pi. Con la combinación de estos elementos el robot dispone de un sensor orientable para la detección de obstáculos, que permite realizar barridos de 180º sin necesidad de mover el robot.
A lo largo de las próximas clases, este proyecto ser irá dotando de otros sensores y actuadores que permitirán ampliar y mejorar su funcionamiento
