Nuestros alumnos del nivel A1, los más jóvenes de Complubot At Home, son unos entusiastas programadores del robot True True , una plataforma educativa especialmente diseñada para usarse durante el primer ciclo de educación primaria.
El robot True True dispone de una gran variedad de sensores y actuadores. En su parte inferior además de las ruedas podemos encontrar cinco sensores reflexivos de luz, gracias a los cuales True True es capaz de identificar distintos tipos de marcas sobre una superficie blanca.
En este caso seguimos programando al robot True True mediante tarjetas codificadores (colores, iconos y textos en inglés) para indicarle que utilice sus sensores reflexivos de la parte inferior para seguir líneas y localizar intersecciones.
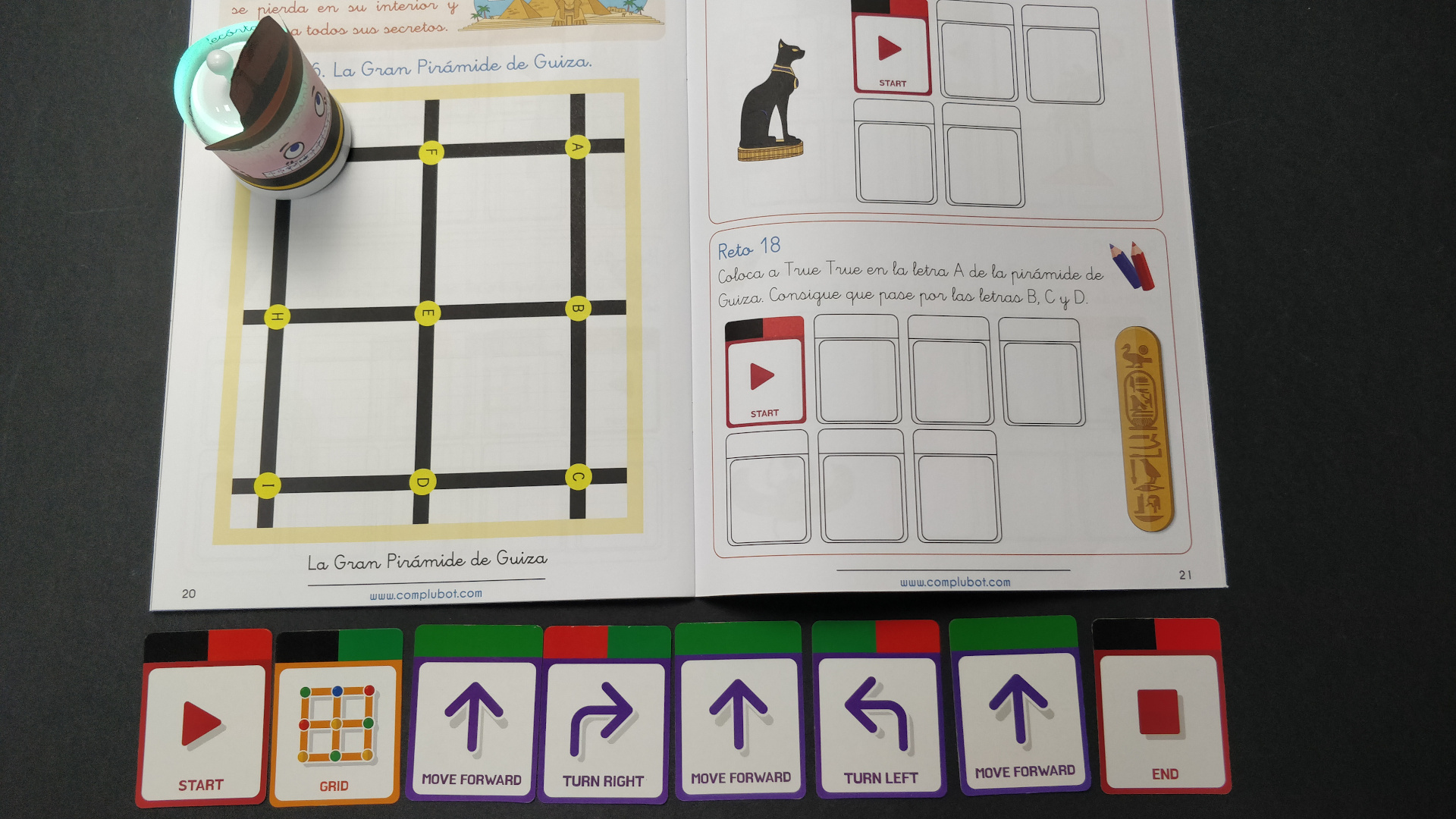
Usando la tarjeta GRID podemos programar los movimientos del robot mediante giros y avances para que se posicione en una intersección concreta de una rejilla. En la contextualización de esta actividad hemos viajado hasta el antiguo Egipto para explorar el interior de una pirámide y descubrir así sus secretos. Naturalmente esta «actividad de riesgo» (para el robot) requiere del equipamiento necesario, de ahí su disfraz de explorador.
